Unabhängig von der genutzten Technologie stellt die Ortung in modernen Netzen immer häufiger eine wichtige Funktion dar. Dies betrifft in unseren Planungsprojekten verschiedenste Kunden. Von der typischen Anwendung der Besucher-App in Museen oder in Messehallen, in denen eine Navigation gewünscht ist, bis zur Ortung von Geräten in der Produktion, lassen sich verschiedenste Anwendungsfälle identifizieren, die eine Lokalisierung benötigen.
Viele der Ortungsanwendungen, die als Treiber der Technologie gesehen werden, arbeiten auf Basis von Smartphone- oder Tablet-Apps. Dies betrifft insbesondere Bereiche, in denen Besucher die Lokalisierung nutzen sollen. Klassische Beispiel-Anwendungen, die die Position des Endgeräts nutzen, gibt es eine ganze Reihe. Diese reichen von der mittlerweile üblichen Indoor-Navigation bis hin zu Anwendungen im Retail-Bereich. Auf einige Details zu derartigen Anwendungen wurde bereits in unserem Artikel zum Thema BLE-Beacons im Netzwerk Insider vom August 2018 eingegangen.
Dennoch möchte ich hier kurz auf einige exemplarische Fälle eingehen. So erlauben Navigationsanwendungen auch innerhalb von Gebäuden (also ohne GPS-Signal zur Ortung) eine Wegführung. Nützlich ist dies insbesondere da, wo der Nutzer sich nicht auskennt, oder in sich regelmäßig ändernden Umgebungen. Einem Messebesucher kann so der Weg zu dem gesuchten Ausstellerstand gewiesen werden oder einem Kunden der Weg zu einem Geschäft oder Regal mit dem gesuchten Produkt. Darüber hinaus können ortsabhängige Informationen auf dem Smartphone angezeigt werden. Einem Museumsbesucher kann somit eine individuelle digitale Tour geboten und Zusatzinformationen zu Künstlern und Werken auf dem Smartphone abhängig vom gerade betrachteten Kunstwerk angezeigt werden.
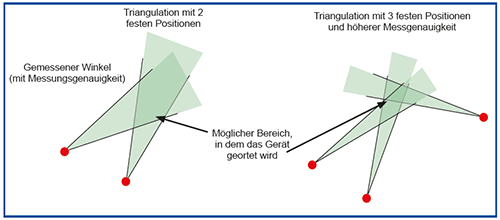
Abbildung 1: Triangulation mit unterschiedlicher Messgenauigkeit
Im Retail-Bereich lässt sich sogenanntes „Proximity Marketing“ umsetzen, bei dem Werbung oder zum Standort passende Sonderangebote angezeigt werden. Aber auch die Ortung des Endgeräts selbst kann eine Rolle spielen. Das Wiederfinden eines Endgeräts im Gebäude kann im Sinne von Gerätemanagement, Asset-Tracking oder Ähnlichem durchaus hilfreich sein. Unterscheiden muss man hier Anwendungsfälle, bei denen ein Endgerät, wie ein Smartphone, seine Position bestimmen will und andere Anwendungsfälle, bei denen die Position eines Endgeräts oder Gegenstands nachverfolgt werden soll.
Immer mehr Anwendungen setzen auf eine Ortung und üblicherweise wird dafür eine entsprechende Infrastruktur benötigt. Im (fast schon) einfachsten Fall genügt eine Ortung mittels GPS (Global Positioning System). Hierbei ist die benötigte Infrastruktur in Form von Satelliten prinzipiell verfügbar. Die Ortung bei GPS ist allerdings meist auf den Außenbereich beschränkt. Im Innenbereich hingegen muss die benötigte Infrastruktur erst geschaffen werden.
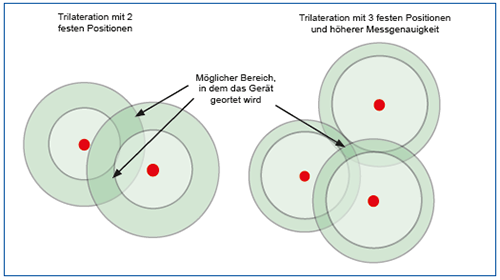
Abbildung 2: Trilateration mit unterschiedlicher Messgenauigkeit
Abhängig von der zugrunde liegenden Technologie bieten sich für den Innenbereich unterschiedliche Varianten an. In den letzten Jahren hat sich immer stärker der Einsatz von Bluetooth- bzw. BLE-Beacons durchgesetzt. Zuvor waren durchaus auch WLAN-basierte Ortungstechnologien üblich.
Die Ortung mittels WLAN könnte in Zukunft wieder an Relevanz gewinnen. Diesen Eindruck kann man insbesondere dann gewinnen, wenn man aktuelle Datenblätter von neuen Access-Points liest. Mittlerweile kann man hier auf das Feature „Wifi Location“ stoßen. Bei weiterer Recherche findet man so auch die entsprechende Zertifizierung der Wi-Fi Alliance (siehe [2]). Seit 2017 bietet die Wi-Fi Alliance bereits die entsprechende Zertifizierung an. Wenn nun erste große WLAN-Hersteller ebenfalls dieses Thema berücksichtigen, ist dies Grund genug für uns, Ortung im Gebäude nochmals zu betrachten und die Unterschiede und Chancen durch die neue Technologie hervorzuheben.
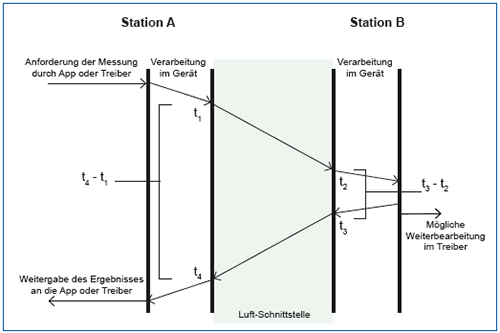
Im vorliegenden Artikel geben wir sowohl einen kurzen Überblick über die weiteren verfügbaren Indoor-Ortungstechnologien als auch über die technischen Aspekte der Ortung mittels Wi-Fi Location. Diese wird manchmal auch als Wi-Fi Round-Trip-Time (RTT) oder Fine Timing Measurement (FTM) bezeichnet. Wir wollen natürlich auch versuchen abzuschätzen, ob diese Technik eine Option für zukünftige Ortungsanwendungen ist.
Grundlagen verschiedener Ortungstechnologien
Es existiert eine ganze Reihe verschiedener Ortungstechnologien, die für die Lokalisierung von Endgeräten in Frage kommen. Neben den unterschiedlichen Anwendungen lassen sich auch weitere Parameter zur Unterscheidung der verschiedenen Technologien heranziehen. Aus technischer Sicht sind hier Triangulation und Trilateration zu nennen. Diese Techniken unterscheiden sich darin, ob der Winkel zwischen zu ortendem Objekt und fester Stationen oder die Entfernung zur Ortsbestimmung genutzt wird. Umgangssprachlich werden beide Varianten fälschlicherweise häufig auch als Triangulation zusammengefasst.
Für Ortungsanwendungen, beispielsweise bei Smartphones, wird meist der Winkel oder Abstand zu festen Punkten, wie den Bluetooth-Beacons, durch das Endgerät bestimmt. Zur endgültigen Positionsbestimmung auf Basis dieser Messungen muss das Endgerät die Positionen der festen Punkte kennen. Dies geschieht häufig durch eine Datenverbindung zu einem entsprechenden Server-System in der Infrastruktur. So kann das Endgerät dann auch die eigene Position ermitteln. Alternativ ermittelt das Server-System auf Basis der Daten die Position des Endgeräts.
Neben dem zu ortenden Endgerät sind also immer ortsfeste Stationen, wie beispielsweise Bluetooth-Beacons oder WLAN-APs, und auch entsprechende Infrastrukturkomponenten beteiligt. Nur durch diese Kombination ist eine Positionsbestimmung möglich.
Bei einer Triangulation werden die benötigten Winkel üblicherweise anhand eingehender Datenpakete durch mehrere Antennen bestimmt. Man spricht hier auch von der Bestimmung des „Angle of Arrival“. Natürlich gilt: Je genauer der bestimmte Winkel, desto genauer auch die Positionsbestimmung.
In Abbildung 1 ist ersichtlich, dass immer eine ausreichende Anzahl an ortsfesten, bekannten Stationen empfangen werden muss. Für eine flache zweidimensionale Karte sollte man mindestens drei Positionen vorsehen. Es wird auch klar, dass die genauen Positionen der bekannten Stationen für die Lokationsgenauigkeit ebenfalls entscheidend sind. Aufgrund der Messungenauigkeit und auch der möglichen Ungenauigkeit der bekannten festen Positionen ergibt sich folglich auch eine Varianz in Bezug auf die bestimmte Endgeräte-Lokation. Moderne Algorithmen ermöglichen es bei mehr empfangbaren Stationen die Lokalisierung deutlich zu verbessern.
Bei der Trilateration wird im Gegensatz zur Triangulation der Abstand zwischen Endgerät und mehreren ortsfesten Stationen gemessen. Zur Ermittlung der Entfernung kommen je nach Technologie verschiedene Verfahren zum Einsatz. Prinzipiell gilt hierbei aber auch wiederum, dass drei ortsfeste Stationen empfangen werden müssen.
Bei der Trilateration ergibt sich ebenfalls, wie in Abbildung 2 eindeutig dargestellt, dass eine genauere Messung der Entfernung auch zu einer genaueren Lokalisierung führt. Mehr empfangbare ortsfeste Stationen führen auch hier zu einer genaueren Positionsbestimmung.
Sowohl bei der Triangulation als auch bei der Trilateration gibt es eine Reihe von Implementierungen und damit auch technologische Varianten. Insbesondere die Art und Weise, wie die Entfernung oder der Winkel ermittelt werden, unterscheidet sich und führt zu unterschiedlicher Genauigkeit. Wie bereits erwähnt ist diese Genauigkeit der Messung ein entscheidender Faktor für die Genauigkeit der Lokalisierung.
Um einen kurzen Überblick über die Möglichkeiten und die Verwendung von Triangulation und Trilateration zu geben, lassen sich ganz typische Ortungstechnologien als Beispiel heranziehen.
Die globalen Navigationssatellitensysteme „Global Positioning System“ (NAVSTAR GPS oder kurz GPS) aber auch GLOSNASS (russisch) oder Galileo (europäisch) setzen bei ihrer Ortung auf eine Form der Trilateration. Natürlich kann die Entfernung zu einem Satelliten in der Erdumlaufbahn nicht so einfach ermittelt werden. Um dies zu bewerkstelligen, senden die Satelliten Datenpakete aus, die ihre Flugbahnen und die genaue Uhrzeit enthalten. Zwischen verschiedenen Zeitpunkten und damit verschiedenen Satellitenpositionen ändert sich die Laufzeit der Signale. Hieraus berechnet der Empfänger (auch anhand seiner eigenen Uhr) die Entfernung der Satelliten und damit seine Position. Für eine Positionierung mittels GPS werden 4 Satelliten benötigt, um Ungenauigkeiten der Empfängeruhr zu bereinigen. Es gibt verschiedene Erweiterungen, wie Differential GPS, um die Genauigkeit weiter zu verbessern. Unter Idealbedingungen verspricht GPS so eine Genauigkeit unter 10 m.
Bei der Lokalisierung mittels BLE-Beacons auf Basis von Bluetooth Low Energy (BLE) wird zur Trilateration eine andere Messgrundlage eingesetzt. Wie bereits in unserem Insider-Artikel vom August 2018 beschrieben, wird hier die empfangene Signalstärke (RSSI – Received Signal Strength Indicator) des Beacon-Signals genutzt, um anhand der erwarteten Dämpfung des Signals die Entfernung zum Empfänger zu bestimmen. Klar ist, dass sich bei diesem Verfahren aufgrund der abzuschätzenden Dämpfung Fehler einschleichen. Diese ist schließlich eine sehr veränderliche Größe. Mehr dazu weiter unten in Bezug auf die bisher übliche Ortung mittels WLAN, die ein vergleichbares Verfahren einsetzt.
Neben der Bestimmung mittels RSSI für eine Trilateration ermöglicht Bluetooth bzw. BLE ab der Version 5.1 auch eine Triangulation. Der Winkel der eingehenden Beacons wird hier durch ein Antennen-Array bestimmt. Das Beacon sendet ein Signal aus, das der Empfänger über die verschiedenen Antennen empfängt. Vergleicht der Empfänger die empfangenen Signale hinsichtlich ihrer Phasenverschiebung, kann er daraus den Winkel des ankommenden Signals berechnen. Abhängig vom Winkel fällt die Phasenverschiebung stärker oder schwächer aus. Analog lässt sich auch der Winkel der Signalabstrahlung des Beacons ermitteln, wenn dieses beim Senden durch verschiedene Antennen durchschaltet. Auch hierzu gibt es herstellerspezifische Entsprechungen bei der Ortung mittels WLAN.
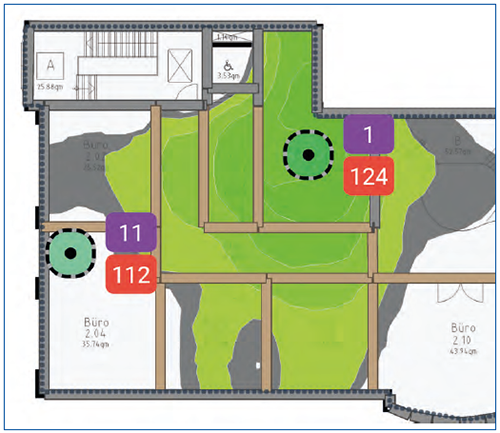
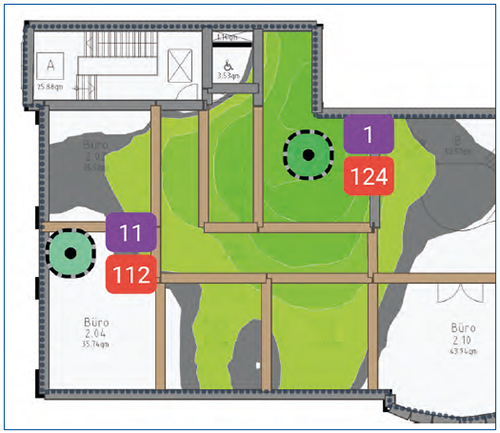
Abbildung 3: Beispiel Ausdehnung eines WLAN-Signals anhand der Signalstärke
Es existieren weitere Verfahren in häufig deutlich spezialisierteren Ortungssystemen. So gibt es Systeme in denen die Sender eine exakte Synchronisierung untereinander erfordern und dann genau abgestimmte extrem kurze Pulse (im Bereich einer Nanosekunde) aussenden. Aufgrund der synchronen Uhren der Sender und der im System bekannten Positionen der Sender kann der Empfänger aus den unterschiedlichen Empfangszeitpunkten den Laufzeitunterschied und damit seine Position bestimmen.
Anhand dieser Beispiele wird das Grundprinzip einer Lokalisierung bereits recht deutlich. Es wird auch klar, dass je nach Technologie die Genauigkeit der Messungen und damit auch der Positionsbestimmung von verschiedenen Aspekten abhängt. So ist es beispielsweise notwendig, eine möglichst genaue Zeiterfassung zu erreichen oder die Dämpfung der Umgebung möglichst genau abzuschätzen. Bei einer Winkelbestimmung spielen insbesondere auch bauliche Parameter wie die Antennenanzahl und Ausrichtung eine entscheidende Rolle. Einige Nachteile können sicherlich durch eine höhere Anzahl ortsfester Sender bzw. Beacons oder Satelliten ausgeglichen werden. Für eine Positionierung muss dabei immer eine ausreichende Anzahl von festen oder bekannten Positionen empfangen werden.
Ortung mittels WLAN bisher
Die Ortung mittels WLAN basiert üblicherweise auf der Durchführung einer Trilateration. Ähnlich wie bei BLE-Beacons wird der RSSI für die Bestimmung der Entfernung zwischen Access-Point und Endgerät herangezogen.
Abhängig von der Entfernung nimmt die Signalstärke ab. Zusätzlich wird diese beeinflusst von Hindernissen, die das Signal entsprechend dämpfen. Dabei spielt alles, was in der Umgebung ist, eine entsprechende Rolle.
Um aber die genaue Entfernung aus dem empfangenen RSSI abzuschätzen, ist es notwendig, die ursprüngliche Sendestärke des Access-Points zu kennen. Typischerweise kennt das Endgerät bzw. die darauf laufende App die ursprüngliche Signalstärke aber nicht. Mit entsprechender zentraler In-
frastruktur, die mit dem WLAN-Controller gekoppelt ist, ist es allerdings möglich, diese Informationen bereitzustellen. Anders arbeitende Systeme müssen auf den Unterschied in der Signalstärke verschiedener Access-Points zurückgreifen.
Im Prinzip muss man bei dieser Ortung, ähnlich wie in anderen Fällen, unterscheiden, ob ein Endgerät sich selbst anhand der Infrastruktur orten oder ob die Infrastruktur das Endgerät lokalisieren soll. Im ersten Fall benötigt das Endgerät zusätzliche Informationen hinsichtlich der Position der WLAN-Access-Points. Auch hierfür wird also eine entsprechende Infrastruktur benötigt, um diese Informationen abzurufen oder die Lokalisierung selbst direkt von dem Dienst im Netz durchführen zu lassen.
Typische Smartphone-Apps nutzen eine Datenverbindung, um die Lokalisierung durchzuführen. Dies dient auch dazu, auf Basis der Position entsprechende Informationen anzuzeigen. Es ist also meist ohnehin ein Netzwerk notwendig, damit die Applikation die lokalisierten Informationen anzeigen kann. Unabhängig von der technischen Umsetzung der Lokalisierung ist also typischerweise eine Verbindung zu Diensten und Services im Netzwerk (oder der Cloud) notwendig. Diese kann beispielsweise über Mobilfunk oder WLAN erfolgen. WLAN wird also in vielen Fällen ohnehin als Kommunikationsmedium geplant und implementiert und steht daher (auch) für eine Ortung zur Verfügung.
Wie bereits beschrieben gibt es verschiedene Faktoren, die die Genauigkeit der Ortung deutlich beeinflussen können. Besonders hervorzuheben ist hier wieder einmal die Dämpfung durch das Gebäude, Gegenstände und Personen. Wo die Dämpfung der baulichen Gegebenheiten durch Kalibrierung in Form von Messungen und Einstellungen in den zentralen Komponenten des Ortungssystems noch relativ gut nachvollziehbar ist, kann dies in der Berechnung berücksichtigt werden. Bereits im Rahmen von WLAN-Planungen zeigt sich der deutliche Einfluss der Dämpfung, wie in Abbildung 3 dargestellt.
Kaum zu berücksichtigen sind aber veränderliche Werte der Dämpfung. Schwieriger vorauszuplanen sind beispielsweise die Dämpfungen durch bewegliche oder veränderliche Gegenstände und Personen. Letzteres ist insbesondere dann von Bedeutung, wenn es um High-Density-Umgebungen geht. Eine Dämpfung aufgrund von Besucherströmen, beispielsweise in einer Ausstellung, stellt hierbei eine besondere Herausforderung dar. Letztlich spielen aber dieselben oder vergleichbare Faktoren auch eine Rolle, wenn es sich nicht um High-Density handelt. Dies stellt den entscheidenden Nachteil einer Entfernungsbestimmung mittels Signalstärke dar.
Daneben sind verschiedene Rahmenbedingungen zu berücksichtigen, die eine Ortung ganz klar beeinflussen. Die Platzierung der Access-Points spielt beispielsweise eine Rolle, da für die Lokalisierung das Signal von drei Access-Points in ausreichender Stärke empfangen werden muss. Um den Fehler in der Positionsbestimmung zu minimieren, ist möglichst eine Dreiecksstruktur, wie bereits in Abbildung 2 gezeigt, zu beachten. Je gleichmäßiger diese Struktur ist, umso verlässlicher werden die ermittelten Werte.
Diese Maßnahmen haben natürlich einen Einfluss auf die Anzahl der benötigten Access-Points und damit auch auf die Kosten für eine solche Lokalisierungsinfrastruktur. Maßgeblich zu berücksichtigen ist hier die Anforderung an die Genauigkeit der Ortung. Diese muss in einer Planung zwingend rechtzeitig definiert werden, um Aufwände gering zu halten.
Am Ende beeinflusst natürlich auch die Konfiguration und Pflege der in der zentralen Ortungsinfrastruktur vorgehaltenen Datenbasis die Genauigkeit. Access-Point-Positionen müssen festgehalten und ggf. gepflegt werden.
Insbesondere der zu betreibende Aufwand in der WLAN-Planung und die sich ergebende Mehrung von WLAN-APs haben dazu geführt, dass sich in den letzten Jahren ganz klar günstige BLE-Beacons als Lokalisierungstechnologie durchgesetzt haben. Dies betrifft insbesondere den Consumer-Bereich. Aufgrund einiger technischer Feinheiten lässt sich hiermit häufig eine bessere oder zumindest vergleichbare Genauigkeit erreichen (Siehe hierzu auch die Netzwerk Insider-Artikel vom Juni und August 2018). Eine engmaschige BLE-Beacon-Versorgung ist vergleichsweise kostengünstig. Von allen hier üblichen Endgeräten, insbesondere Smartphones, wird diese Technologie schließlich unterstützt.
Auch im Bereich der WLAN-basierten Ortung gibt es einige Kniffe, die eine verbesserte Genauigkeit erlauben. So bieten verschiedene Hersteller Zusatzfunktionen oder Module für ihre Access-Points an, die beispielsweise eine Erfassung des Winkels des eingehenden Signals ermöglichen. Dies kann im Zusammenspiel mit der zentralen Infrastruktur eine entsprechende Erhöhung der Genauigkeit mit sich bringen. Klar ist aber, dass zusätzliche Hardware immer auch zusätzliche Kosten bedeutet.